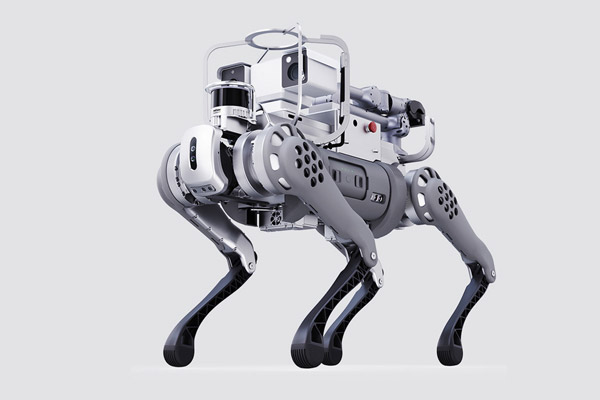
具身智能赋能未来 让科研更精准,教育更生动 解决方案 基于松灵Cobot Magic,实现多种全身动作任务研究人员借助CobotMagic双臂机器人实施了衣物折叠收纳实验。实验先利用扩散模型生成多样化衣物模拟数据,涵盖形态及折叠物理变化,为机器人训练提供素材。随后,通过具身课程学习策略,机器人在实操环境中逐步优化折叠动作,从平整到复杂折叠,每一步均精细调试。 宇树机器狗B2实现无人化智能巡检巡检机器人在具身智能领域的解决方案聚焦于感知层的高精度传感器与机器视觉技术、网络层的高效数据传输与处理机制,以及应用层的智能分析与决策系统,实现复杂环境下的自主导航、实时监测与精准巡检。 用于机器人学习的低成本、高效和拟人化的机械手灵巧手解决方案基于先进的机器人控制算法和高速高精度三维机器视觉技术,结合清华大学自动化系李翔教授团队的研究成果,实现了灵巧手在复杂任务中的高效操作。该方案的核心在于分层控制算法和触觉反馈系统,能够在无需重新抓取的情况下,完成高精度的物体操作和长时程任务 FRANKA RESEARCH 3 具有7个自由度,每个关节都配有扭矩传感器工业级姿势重复性为 +/-0.1毫米有效载荷为 3公斤,可达 855 毫米,工作空间覆盖率为 94.5%. 松灵PIPER 六轴轻量级机械臂,整机重量仅4.2KG +/-0.1mm的重复定位精度 有效载荷为1.5公斤,626mm超大工作半径适配Python开发环境,简化开发流程,拓宽应用边界,兼容ROS1、ROS2 松灵Cobot Magic 可用于双臂移动操作的数据采集、自动化应用部署与智能化任务执行支持斯坦福ALOHA等开源算法的复现,为具身智能数据采集提供一站式解决方案 合作伙伴